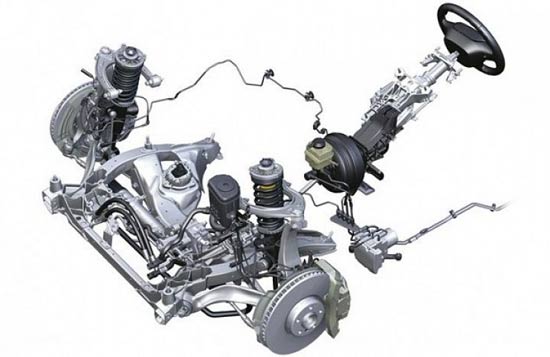
سیستم فرمان برقی (EPS)، جایگزین سیستمهای هیدرولیک قدیمی شده است و با استفاده از یک موتور الکتریکی و سنسورها، نیروی کمکی لازم برای چرخاندن فرمان را تأمین میکند. عیبیابی این سیستم نیازمند درک دقیق تعامل بین سنسورها، ماژول کنترل و موتور است.
۱. آشنایی با اجزای اصلی سیستم EPS
سیستم EPS از سه بخش کلیدی تشکیل شده است:
- سنسور گشتاور (Torque Sensor): حیاتیترین سنسور که میزان نیروی وارد شده توسط راننده به غربیلک فرمان را اندازهگیری میکند.
- ECU فرمان (EPS Control Module): مغز سیستم که دادههای سنسور گشتاور، سنسور سرعت خودرو و سنسور زاویه فرمان را پردازش کرده و بر اساس آن، میزان نیروی کمکی مورد نیاز را محاسبه و به موتور فرمان فرمان میدهد.
- موتور الکتریکی (EPS Motor): موتور DC یا Brushless که نیروی کمکی را به ستون فرمان (در سیستم C-EPS) یا دنده شانهای (در سیستم P-EPS) اعمال میکند.
۲. ایرادات شایع و علائم خرابی EPS
مشکلات EPS اغلب خود را به صورت از دست رفتن کامل یا جزئی نیروی کمکی، یا نویز و لرزش نشان میدهند.
علامت خرابی | علت احتمالی اصلی |
سفت شدن ناگهانی فرمان | خرابی یا از دست رفتن سیگنال سنسور گشتاور (شایعترین علت)، خرابی ECU، یا قطع شدن برق ولتاژ بالا به موتور. |
روشن شدن چراغ هشدار EPS | خطا در ارتباط CAN با سایر یونیتها (مثلاً سنسور سرعت)، خطای داخلی ECU، یا خطای کالیبراسیون. |
لرزش یا نویز در فرمان | خرابی بلبرینگها و قطعات مکانیکی موتور یا ستون فرمان، یا عدم کالیبراسیون صحیح سنسور گشتاور. |
فرمانگیری غیریکنواخت (Over/Under Assist) | تنظیم نادرست پارامترهای کمکی در ECU، یا خطای متناوب در سیگنال سنسور سرعت. |
۳. راهنمای گام به گام عیبیابی تخصصی
عیبیابی EPS تقریباً همیشه با استفاده از دستگاه دیاگ تخصصی آغاز میشود.
گام ۱: خواندن کدهای خطا و بررسی ارتباطات
- بررسی DTCها: کدهای خطای ثبت شده در ECU فرمان را بخوانید. کدهای مربوط به "از دست رفتن سیگنال" یا "خطای داخلی یونیت" را جدی بگیرید.
- بررسی ارتباط CAN: مطمئن شوید ECU فرمان با سایر یونیتهای حیاتی (مانند ABS/ESC برای دریافت سرعت خودرو، و BCM برای برقرسانی) از طریق شبکه CAN ارتباط برقرار میکند. خطای ارتباطی شایع است.
گام ۲: تست پارامترهای حیاتی (Live Data)
در حین حرکت یا چرخاندن فرمان (با خاموش و روشن بودن موتور) پارامترهای زیر را بررسی کنید:
- سنسور گشتاور (Torque Sensor Reading):
- در حالت سکون و بدون نیروی دست، باید تقریباً صفر (Zero Torque) باشد.
- با چرخاندن آرام فرمان به راست و چپ، مقدار باید به صورت متقارن مثبت و منفی شود. اگر مقدار ثابت بماند یا متناوباً صفر شود، سنسور گشتاور معیوب است.
- سرعت خودرو (Vehicle Speed Signal):
- ECU فرمان از این سیگنال استفاده میکند؛ در سرعت بالا نیروی کمکی را کاهش میدهد. اگر این سیگنال در حالت حرکت صفر یا غیرواقعی باشد، ECU فرمان را سفت میکند.
- ولتاژ موتور (EPS Motor Voltage):
- بررسی کنید که آیا ولتاژ تغذیه کافی به موتور میرسد. افت ولتاژ در هنگام شروع حرکت میتواند ناشی از خرابی سیمکشی یا رله باشد.
گام ۳: عیبیابی الکترومکانیکی و کالیبراسیون
- بازرسی فیزیکی و نویز: صدای ضربه یا سایش از ستون فرمان، معمولاً به دلیل خرابی کوپلینگ (Coupling) یا بوشهای موتور است (به ویژه در سیستمهای C-EPS).
- تست فعالسازی (Actuator Test): در صورت امکان، با استفاده از دیاگ، ECU فرمان را مجبور کنید تا موتور را به صورت آزمایشی فعال کند و عملکرد آن را تأیید کنید.
- کالیبراسیون زاویه فرمان (Steering Angle Sensor Calibration): پس از تعویض ECU، سنسور گشتاور، یا هرگونه عملیات مکانیکی روی فرمان، باید فرآیند کالیبراسیون نقطه صفر (Zero Point Calibration) انجام شود تا سنسور گشتاور مقدار خنثی را بیاموزد.
۴. انواع سیستمهای EPS و ملاحظات خاص
نوع سیستم EPS | محل قرارگیری موتور | ملاحظات تخصصی در عیبیابی |
C-EPS (Column Assist) | روی ستون فرمان، داخل کابین | سایش کوپلینگهای پلیمری، نویز آسانتر تشخیص داده میشود. |
P-EPS (Pinion Assist) | روی پینیون یا دنده شانهای (Rack) | در معرض نفوذ آب و آلودگی بیشتر است. عیبیابی سیمکشی پیچیدهتر است. |
R-EPS (Rack Assist) | روی بدنه دنده شانهای (رایج در خودروهای سنگین و پرفورمنس) | نیاز به گشتاور بالا و ولتاژ بیشتر. خطای سنسور گشتاور (در داخل راک) دشوارتر رفع میشود. |